 |
mFrame
|
|
mFrame
|
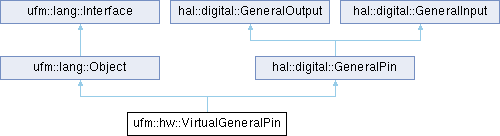
虛擬GPIO引腳類別。 更多...
#include <VirtualGeneralPin.h>
公開方法(Public Methods) | |
| VirtualGeneralPin (void) | |
| 建構虛擬GPIO引腳。 | |
| virtual | ~VirtualGeneralPin (void) override |
| 解構虛擬通用引腳物件。 | |
| virtual GeneralPin::Mode | getPinMode (void) override |
| 取得引腳目前的工作模式。 | |
| virtual GeneralPin::Mode | setPinMode (GeneralPin::Mode mode) override |
| 設定引腳的工作模式。 | |
| virtual bool | getDir (void) override |
| 取得引腳的方向。 | |
| virtual hal::digital::GeneralPin & | setDir (bool dir) override |
| 設定引腳的方向。 | |
| virtual hal::digital::GeneralPin & | setInput (void) override |
| 將引腳模式設定為輸入模式。 | |
| virtual hal::digital::GeneralPin & | setOutput (void) override |
| 將引腳模式設定為輸出模式。 | |
| virtual hal::digital::GeneralOutput & | setHigh (void) override |
| 設定輸出為高電平。 | |
| virtual hal::digital::GeneralOutput & | setLow (void) override |
| 設定輸出為低電平。 | |
| virtual hal::digital::GeneralOutput & | setToggle (void) override |
| 設定引腳輸出反向電平。 | |
| virtual hal::digital::GeneralOutput & | setValue (bool level) override |
| 設定引腳輸出電平。 | |
| virtual bool | getValue (void) override |
| 讀取引腳輸入電平。 | |
| virtual bool | setInputValue (bool level) |
| 模擬輸入訊號。 | |
 公開方法(Public Methods) 繼承自 ufm::lang::Object 公開方法(Public Methods) 繼承自 ufm::lang::Object | |
| void * | operator new (size_t n) |
| 使用運算子 new 分配記憶體 | |
| void * | operator new (size_t n, void *p) |
| 在指定記憶體上調用運算子 new | |
| virtual ufm::lang::Object & | getObject (void) override |
| 取得對應的 Object 物件 | |
| void | delay (int milliseconds) const |
| 延遲指定的毫秒數進行執行緒等待 | |
| bool | equals (Object *object) const |
| 判斷與另一物件是否為相同參照(指標型態比較) | |
| bool | equals (Object &object) const |
| 判斷與另一物件是否為相同參照(參照型態比較) | |
| void | wait (void) const |
| 使當前線程等待直到被通知 | |
| bool | wait (int timeout) const |
| 等待通知或超時 | |
| bool | yield (void) const |
| 讓執行緒讓渡控制權給同優先權的下一個執行緒 | |
| int | lock (void) const |
| 核心鎖定,鎖定期間禁止線程切換 | |
| int | unlock (void) const |
| 核心解鎖 | |
| ufm::sys::Thread * | currentThread (void) const |
| 取得當前執行緒指標 | |
| virtual int | hashcode (void) const |
| 返回對象的哈希碼值。支持這種方法是為了散列表,如HashMap提供的那樣。 | |
| 公開方法(Public Methods) 繼承自 ufm::lang::Interface | |
| virtual | ~Interface (void)=default |
| 虛擬析構函式 | |
| 公開方法(Public Methods) 繼承自 hal::digital::GeneralPin | |
| virtual GeneralPin::Mode | setPinMode (GeneralPin::Mode mode) override |
| 設定引腳的工作模式。 | |
額外的繼承成員 | |
| 公開型態 繼承自 hal::digital::GeneralPin | |
| enum struct | Mode : uint8 { NOT_SUPPORT , FLOAT , PUSH_PULL , PULL_UP , PULL_DOWN , OPEN_DRAIN , OPEN_DRAIN_PULL_UP } |
| GPIO引腳電氣特性模式。 更多... | |
虛擬GPIO引腳類別。
用於模擬GPIO引腳行為的軟體實作:
| ufm::hw::VirtualGeneralPin::VirtualGeneralPin | ( | void | ) |
建構虛擬GPIO引腳。
初始化一個新的虛擬GPIO引腳實例:
|
overridevirtual |
取得引腳的方向。
此方法回傳引腳目前的方向設定,用以確認該引腳是處於輸出或輸入模式。
|
overridevirtual |
取得引腳目前的工作模式。
此方法回傳硬體引腳當前的工作模式,可用於檢查或在切換模式前確認目前狀態。
|
overridevirtual |
讀取引腳輸入電平。
讀取當前引腳的電平狀態,可用於輸入模式下讀取外部信號, 或在輸出模式下確認當前輸出狀態。
|
overridevirtual |
設定引腳的方向。
根據傳入的參數,設定引腳為輸出或輸入。此方法可動態調整引腳方向, 使其能夠根據應用需求執行相應功能。
| dir | 設定方向:true 為輸出,false 為輸入。 |
|
overridevirtual |
|
overridevirtual |
將引腳模式設定為輸入模式。
此方法相當於執行 setDir(false) 操作,方便使用者直觀地將引腳設定為輸入模式。
|
virtual |
模擬輸入訊號。
當引腳設定為輸入模式時,可透過此方法設定模擬的輸入電平值。 這對於測試和開發非常有用,可以模擬外部信號輸入。
| level | 要模擬的輸入電平:true 為高電平,false 為低電平 |
|
overridevirtual |
|
overridevirtual |
將引腳模式設定為輸出模式。
此方法相當於執行 setDir(true) 操作,方便使用者直觀地將引腳設定為輸出模式。
|
overridevirtual |
設定引腳的工作模式。
此方法設定引腳的工作模式,並回傳設定後的模式。使用者可根據硬體需求設定合適的模式, 例如:推挽輸出、上拉、下拉或開漏模式。
| mode | 指定的工作模式,選項如下: |
|
overridevirtual |
|
overridevirtual |