 |
mFrame
|
|
mFrame
|
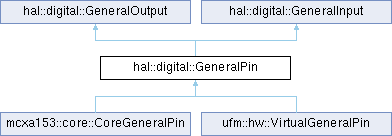
[Interface] GPIO引腳基礎介面。 更多...
#include <GeneralPin.h>
公開型態 | |
| enum struct | Mode : uint8 { NOT_SUPPORT , FLOAT , PUSH_PULL , PULL_UP , PULL_DOWN , OPEN_DRAIN , OPEN_DRAIN_PULL_UP } |
| GPIO引腳電氣特性模式。 更多... | |
公開方法(Public Methods) | |
| virtual GeneralPin::Mode | getPinMode (void) override |
| 取得引腳目前的工作模式。 | |
| virtual GeneralPin::Mode | setPinMode (GeneralPin::Mode mode) override |
| 設定引腳的工作模式。 | |
| virtual bool | getDir (void) override |
| 取得引腳的方向。 | |
| virtual hal::digital::GeneralPin & | setDir (bool dir) override |
| 設定引腳的方向。 | |
| virtual hal::digital::GeneralPin & | setInput (void) override |
| 將引腳模式設定為輸入模式。 | |
| virtual hal::digital::GeneralPin & | setOutput (void) override |
| 將引腳模式設定為輸出模式。 | |
 公開方法(Public Methods) 繼承自 hal::digital::GeneralOutput 公開方法(Public Methods) 繼承自 hal::digital::GeneralOutput | |
| virtual hal::digital::GeneralOutput & | setHigh (void) override |
| 設定輸出為高電平。 | |
| virtual hal::digital::GeneralOutput & | setLow (void) override |
| 設定輸出為低電平。 | |
| virtual hal::digital::GeneralOutput & | setToggle (void) override |
| 設定引腳輸出反向電平。 | |
| virtual hal::digital::GeneralOutput & | setValue (bool level) override |
| 設定引腳輸出電平。 | |
| 公開方法(Public Methods) 繼承自 hal::digital::GeneralInput | |
| virtual bool | getValue (void) override |
| 讀取引腳輸入電平。 | |
[Interface] GPIO引腳基礎介面。
定義單一GPIO引腳的基本操作功能:
|
strong |
|
pure virtual |
取得引腳的方向。
此方法回傳引腳目前的方向設定,用以確認該引腳是處於輸出或輸入模式。
實作於 mcxa153::core::CoreGeneralPin, ufm::hw::InvertGeneralPin, 及 ufm::hw::VirtualGeneralPin.
|
pure virtual |
取得引腳目前的工作模式。
此方法回傳硬體引腳當前的工作模式,可用於檢查或在切換模式前確認目前狀態。
實作於 mcxa153::core::CoreGeneralPin, ufm::hw::InvertGeneralPin, 及 ufm::hw::VirtualGeneralPin.
|
pure virtual |
設定引腳的方向。
根據傳入的參數,設定引腳為輸出或輸入。此方法可動態調整引腳方向, 使其能夠根據應用需求執行相應功能。
| dir | 設定方向:true 為輸出,false 為輸入。 |
實作於 mcxa153::core::CoreGeneralPin, ufm::hw::InvertGeneralPin, 及 ufm::hw::VirtualGeneralPin.
|
pure virtual |
將引腳模式設定為輸入模式。
此方法相當於執行 setDir(false) 操作,方便使用者直觀地將引腳設定為輸入模式。
實作於 mcxa153::core::CoreGeneralPin, ufm::hw::InvertGeneralPin, 及 ufm::hw::VirtualGeneralPin.
|
pure virtual |
將引腳模式設定為輸出模式。
此方法相當於執行 setDir(true) 操作,方便使用者直觀地將引腳設定為輸出模式。
實作於 mcxa153::core::CoreGeneralPin, ufm::hw::InvertGeneralPin, 及 ufm::hw::VirtualGeneralPin.
|
pure virtual |
設定引腳的工作模式。
此方法設定引腳的工作模式,並回傳設定後的模式。使用者可根據硬體需求設定合適的模式, 例如:推挽輸出、上拉、下拉或開漏模式。
| mode | 指定的工作模式,選項如下: |